


{kind=link}

New methodology in robotics boosts precision in pick-and-place duties by studying from simulations, permitting robots to deal with varied jobs with enhanced accuracy.
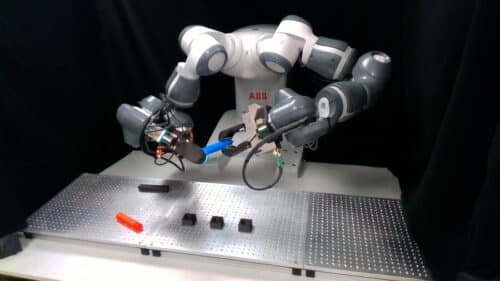
Credit:Picture: John Freidah/MIT Division of Mechanical Engineering
Decide-and-place machines automate the position of objects in structured areas, serving varied purposes akin to electronics meeting and inspection. Nevertheless, many lack “exact generalization,” struggling to carry out a number of duties precisely. A current research in Science Robotics have launched a brand new methodology referred to as SimPLE (Simulation to Decide Localize and placE), which reinforces precision through the use of an object’s CAD mannequin to discover ways to systematically deal with objects with out prior expertise, successfully organizing unstructured preparations.
The promise of SimPLE is that it allows fixing quite a lot of duties utilizing the identical {hardware} and software program, by using simulations to be taught fashions tailor-made to every particular activity. SimPLE was developed by the Manipulation and Mechanisms Lab at MIT (MCube).

It’s famous that their work demonstrates the potential to realize the degrees of positional accuracy mandatory for a lot of industrial choose and place duties with none further specialization.
The SimPLE resolution makes use of a dual-arm robotic geared up with visuotactile sensors and is constructed on three key parts: task-aware greedy, built-in sight and contact notion (visuotactile notion), and regrasp planning. It compares actual observations with simulated ones utilizing supervised studying to estimate a spread of possible object positions, enabling exact placement.
In testing, SimPLE successfully demonstrated its functionality to select and place quite a lot of objects with completely different shapes. It achieved profitable placements greater than 90 % of the time for six objects, and over 80 % of the time for eleven objects.
There’s an intuitive understanding throughout the robotics neighborhood that each imaginative and prescient and contact are helpful, but systematic demonstrations of their utility for advanced robotics duties have been uncommon. This research extends past the goal to imitate human capabilities, demonstrating from a strictly practical perspective the advantages of mixing tactile sensing and imaginative and prescient with dual-hand manipulation.